Wheel Spinning Robot (2020)
CAD

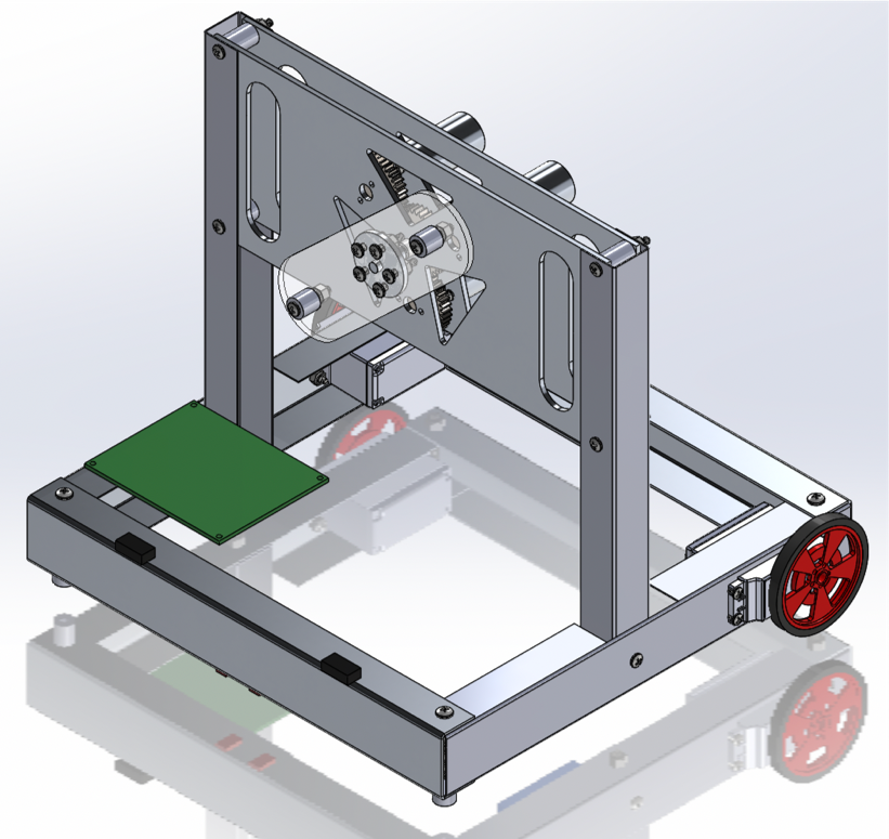
Cross section view of gearbox assembly
Motivation:
This robot was designed for MIT course 2.007, Design & Manufacturing I.
Description:
This robot was designed to spin a wheel as fast as possible. The wheel had a large flywheel on the back, so required a lot of torque to get it up to speed. The robot used 3 motors with a 1:1 gear ratio to spin the wheel. Unfortunately, the semester was cut short due to COVID-19, so I finished it in CAD and never got the chance to assemble the full robot.
Lessons Learned:
I learned a lot about Solidworks sheet metal tools for this project. With my first prototype, I also learned that things don’t always work as they are expected to on paper.